
- 198
- 613 080
Aaron Becker
United States
Приєднався 10 жов 2009
Aaron Becker's passion is robotics & control. As an Associate Prof. in Electrical & Computer Engineering at the University of Houston, he is building a robotics lab. An NSF '16 CAREER recipient & winner of several best papers, his lab manipulates micro-scale swarms with magnetic fields, navigates robotic tools using medical MRIs, kills mosquitos with drones, searches for oil, and assembles structures with swarms.
Previously as '23 Alexander von Humboldt Fellow he studied algorithms for self-assembly in Braunschweig Germany. As a '13 Research Fellow with Boston Children's Hospital & Harvard Medical School, he implemented robotics powered and controlled by the magnetic field of an MRI. As a '12 Rice University Postdoc in the Multi-Robot Systems Lab, Aaron investigated control of distributed systems and nanorobotics with experts in the fields. Aaron earned his PhD in Electrical & Computer Engineering at the University of Illinois at Urbana-Champaign.
Previously as '23 Alexander von Humboldt Fellow he studied algorithms for self-assembly in Braunschweig Germany. As a '13 Research Fellow with Boston Children's Hospital & Harvard Medical School, he implemented robotics powered and controlled by the magnetic field of an MRI. As a '12 Rice University Postdoc in the Multi-Robot Systems Lab, Aaron investigated control of distributed systems and nanorobotics with experts in the fields. Aaron earned his PhD in Electrical & Computer Engineering at the University of Illinois at Urbana-Champaign.
Min-Time Planar Paths with L2 Velocity & Acceleration Constraints, Limited # Constant Acc. Inputs
Our paper examines methods to quickly compute a time-optimal path for no-more than two thrust inputs, under speed and acceleration limits. Our solutions provide the time-optimal solution for reaching a goal position, or for stopping at a goal position, even when compared to continuously varying acceleration inputs. It enables quickly finding trajectories between arbitrary ending and starting states.
"Minimum-Time Planar Paths with L_2 Velocity and Acceleration Constraints and a Limited Number of Constant Acceleration Inputs", 2024 American Control Conference, acc2024.a2c2.org/
Authors: Victor M. Baez, Haoran Zhao, Nihal Abdurahiman, Nikhil V. Navkar, and Aaron T. Becker
This work was supported by National Priority Research Program (NPRP) award (NPRP13S-0116-200084) from the Qatar National Research Fund (a member of The Qatar Foundation),
the Alexander von Humboldt Foundation, and the National Science Foundation under www.nsf.gov/awardsearch/showAward?AWD_ID=1932572 CNS 1932572,
nsf.gov/awardsearch/showAward?AWD_ID=1849303 IIS 1849303, and
nsf.gov/awardsearch/showAward?AWD_ID=2130793 IIS 2130793. All opinions, findings, conclusions or recommendations expressed in this work are those of the authors and do not necessarily reflect the views of our sponsors.
"Minimum-Time Planar Paths with L_2 Velocity and Acceleration Constraints and a Limited Number of Constant Acceleration Inputs", 2024 American Control Conference, acc2024.a2c2.org/
Authors: Victor M. Baez, Haoran Zhao, Nihal Abdurahiman, Nikhil V. Navkar, and Aaron T. Becker
This work was supported by National Priority Research Program (NPRP) award (NPRP13S-0116-200084) from the Qatar National Research Fund (a member of The Qatar Foundation),
the Alexander von Humboldt Foundation, and the National Science Foundation under www.nsf.gov/awardsearch/showAward?AWD_ID=1932572 CNS 1932572,
nsf.gov/awardsearch/showAward?AWD_ID=1849303 IIS 1849303, and
nsf.gov/awardsearch/showAward?AWD_ID=2130793 IIS 2130793. All opinions, findings, conclusions or recommendations expressed in this work are those of the authors and do not necessarily reflect the views of our sponsors.
Переглядів: 147
Відео
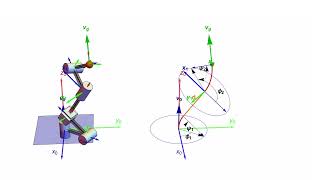

An *Analytic* Solution to the 3D CSC Dubins Path Problem!
Переглядів 235Місяць тому
A Dubins path is the shortest length path for an object with a bounded curvature (minimum turning radius). Our ICRA 2024 paper shows how to generate all the Curve-Straight-Curve paths between two starting and ending positions and orientations in 3D! We show a one-to-one mapping between a RRPRR robot and a 3D CSC Dubins path. The solution involves forming and solving a system of multivariate pol...
![Reconfiguration of a 2D Structure Using Spatio-Temporal Planning and Load Transferring [ICRA 2024]](http://i.ytimg.com/vi/aatbQ9FGW0A/mqdefault.jpg)
Reconfiguration of a 2D Structure Using Spatio-Temporal Planning and Load Transferring [ICRA 2024]
Переглядів 64Місяць тому
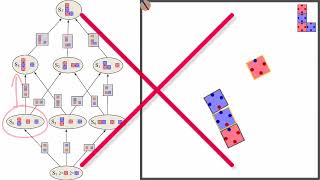
Building a structure out of smart robots is wasteful. Instead, use the robots to move and assemble dumb blocks. Problems arise when robot's paths intersect. In this video Javier Garcia explains his team's algorithms to enable efficient motion planning for robots as they rearrange voxel structures. [presentation video for 2024.ieee-icra.org/] Paper title: "Reconfiguration of a 2D Structure Using...
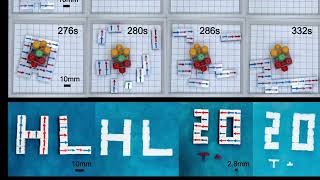
Assembly Planning for Magnetic Modular Cubes ICRA 2024
Переглядів 942 місяці тому
6-minute overview of motion planning algorithm for magnetic cubes controlled by a global magnetic field. The key insight is building a graph of possible build states, and using a depth-first-search of this graph to see what build order is most ikely. This is the presentation video for paper "SE(2) Assembly Planning for Magnetic Modular Cubes" at 2024.ieee-icra.org/ Magnetic modular cubes are cu...
SE(2) Assembly Planning for Magnetic Modular Cubes -- ICRA 2024
Переглядів 1752 місяці тому
Companion video for paper "SE(2) Assembly Planning for Magnetic Modular Cubes" at 2024.ieee-icra.org/ Magnetic modular cubes are cube-shaped bodies with embedded permanent magnets. The cubes are uniformly controlled by a global time-varying magnetic field. By Kjell Keune & Aaron Becker A 2D physics simulator is used to simulate global control and the resulting continuous movement of magnetic mo...

Reconfiguration of a 2D Structure Using Spatio-Temporal Planning and Load Transferring
Переглядів 7522 місяці тому
How should a cooperative group of robots reconfigure a 2D arrangement of building material? These robots must avoid collisions, deadlocks, and are subjected to the constraint of maintaining connectivity of the structure. We develop two reconfiguration methods, one based on spatio-temporal planning, and one based on target swapping, to increase building efficiency. The first method can significa...

Insertion, Retrieval & Performance of Miniature Magnetic Rotating Swimmers for Thrombi Treatment
Переглядів 30911 місяців тому
[IROS 2023 paper] Miniature Magnetic Rotating Swimmers (MMRSs) are untethered machines containing magnetic materials. An external rotating magnetic field produces a torque on the swimmers to make them rotate. MMRSs have propeller fins that convert the rotating motion into forward propulsion. This type of robot has been shown to have potential applications in the medical realm. This paper presen...

Tilt Motion Planning: Motion Plans for Assembling Particles with Global Control
Переглядів 18211 місяців тому
[IROS 2023 paper: arxiv.org/abs/2307.02873 ] We investigate motion planning algorithms for the assembly of shapes in the *tilt model* in which unit-square tiles move in a grid world under the influence of uniform external forces and self-assemble according to certain rules. We provide several heuristics and experimental evaluation of their success rate, solution length, and runtime. [code: gith...

Coding a Reeds-Shepp Car Optimal Path Planner
Переглядів 3,8 тис.Рік тому
This video shows how to generate the shortest length path between given start and ending positions for a car that can go forwards and reverse. All code is available at demonstrations.wolfram.com/ShortestPathForForwardAndReverseMotionOfACar/ (by Francesco Bernardini and Aaron Becker) Introduction to Robotics: Lecture 26a (Dubins car) at ua-cam.com/video/tjUVE3jto98/v-deo.html Lecture 26b (Homici...
Coding a Dubins Car Optimal Path Planner
Переглядів 7 тис.Рік тому
This video shows how to generate the shortest length path for a car that can only move forwards between given start and ending positions. All code is available at demonstrations.wolfram.com/ShortestPathForTheDubinsCar/ Lecture 26a (This video) Dubins car ua-cam.com/video/tjUVE3jto98/v-deo.html Lecture 26b Homicidal Chauffeur at ua-cam.com/video/pbSCsGh_OBo/v-deo.html Lecture 26c Reeds-Shepp car...
Gathering Physical Particles with a Global Magnetic Field Using Reinforcement Learning
Переглядів 450Рік тому
For biomedical applications in targeted therapy delivery and interventions, a large swarm of micro-scale particles ("agents") has to be moved through a maze-like environment ("vascular system") to a target region ("tumor"). Due to limited on-board capabilities, these agents cannot move autonomously; instead, they are controlled by an external global force that acts uniformly on all particles. I...
Connected Reconfiguration of Polyominoes Amid Obstacles using RRT*
Переглядів 384Рік тому
How would a robot reconfigure a polyomino (a connected set of tiles)? That is the question answered by our IROS 2022 paper arxiv.org/abs/2207.01282 "Connected Reconfiguration of Polyominoes Amid Obstacles using RRT*" by Javier Garcia, Michael Yannuzzi, Peter Kramer, Christian Rieck, and Aaron T. Becker, to be presented in Kyoto Japan. This paper investigates using a sampling-based approach, the...
Jerk continuous Online Trajectory Generation for Robot Manipulator
Переглядів 637Рік тому
What do you do if you need a *really* smooth robot trajectory (with no sudden changes in velocity or acceleration)? One way is to use a set of smooth jerk (the derivative of acceleration) commands. In this paper, we present a scheme and code to do that. Authors: Haoran Zhao, Nihal Abdurahiman, Nikhil Navkar, Julien Leclerc, and Aaron T. Becker, "Jerk-continuous Online Trajectory Generation for ...
Wetland Soil Strength Tester and Core Sampler Using a Drone (ICRA 2021)
Переглядів 7633 роки тому
Drone deployment & retrieval of an instrumented dart for measuring soil strength in soft soils. An assembly sequence shows how the retrieval mechanism was constructed. Then successive drop tests are shown with the data collected. A final video shows an alternate tip design that can collect a set of soil samples at different soil depths, and rotate an inner cartridge so that the sampling can be ...
The Reachable Set of a Drone: Exploring the Position Isochrones for a Quadcopter
Переглядів 7753 роки тому
If you know the position, velocity and orientation of a quadcopter, can you predict where it will be next? Better yet, can you predict all possible places it could be in, say 1 second? That's exactly what we solve in our paper! Our contribution is to calculate the "time-limited reachable set", the set of all position states reachable by the quadcopter at time t. These plots use equal time conto...
Congratulations Class of 2020! [Big fish released from a little pond]
Переглядів 5853 роки тому
Congratulations Class of 2020! [Big fish released from a little pond]
Manipulability and Optimizing Joint Velocity, Intro2Robotics lecture 25
Переглядів 2,4 тис.3 роки тому
Manipulability and Optimizing Joint Velocity, Intro2Robotics lecture 25
PRM: Probabilistic Roadmap Method in 3D and with 7-DOF robot arm
Переглядів 7 тис.3 роки тому
PRM: Probabilistic Roadmap Method in 3D and with 7-DOF robot arm
Graham Scan Tutorial: Convex Hull of a Set of 2D Points
Переглядів 7 тис.3 роки тому
Graham Scan Tutorial: Convex Hull of a Set of 2D Points
Robot Configuration spaces, Intro2Robotics Lecture 21
Переглядів 1,6 тис.3 роки тому
Robot Configuration spaces, Intro2Robotics Lecture 21
"The CURSE of dimensionality" Intro 2 Robots Lecture 20
Переглядів 7203 роки тому
"The CURSE of dimensionality" Intro 2 Robots Lecture 20
Intro2Robotics19: Image Geometry and Image Calibration
Переглядів 7983 роки тому
Intro2Robotics19: Image Geometry and Image Calibration
Intro2Robotics18: centroids and moments with computer vision
Переглядів 9943 роки тому
Intro2Robotics18: centroids and moments with computer vision
Intro2Robotics Lecture 16: Stereo Vision and Vanishing Points
Переглядів 1,5 тис.3 роки тому
Intro2Robotics Lecture 16: Stereo Vision and Vanishing Points
Intro2Robotics Lecture 15: Computer Vision, world frame to camera frame to pixel coordinates
Переглядів 6 тис.3 роки тому
Intro2Robotics Lecture 15: Computer Vision, world frame to camera frame to pixel coordinates
Intro2Robotics Lecture 14b: Manipulator Singularities Examples
Переглядів 3,3 тис.3 роки тому
Intro2Robotics Lecture 14b: Manipulator Singularities Examples
Intro2Robotics Lecture 14a: Manipulator Singularities
Переглядів 10 тис.3 роки тому
Intro2Robotics Lecture 14a: Manipulator Singularities
Intro2Robotics Lecture 10b: Jacobian & derivative of rotation matrices
Переглядів 2,6 тис.3 роки тому
Intro2Robotics Lecture 10b: Jacobian & derivative of rotation matrices
Intro2Robotics Lecture 10a: angular velocity & skew symmetric matrices
Переглядів 3,2 тис.3 роки тому
Intro2Robotics Lecture 10a: angular velocity & skew symmetric matrices
Intro2Robotics Lecture 7c: Forward to Inverse Kinematics example
Переглядів 8 тис.3 роки тому
Intro2Robotics Lecture 7c: Forward to Inverse Kinematics example
In matrix A2 isn't the translation along the x axis by r2? Why were c2 and s2 used instead
Super useful video. Also loved the UI in matlab. could you give the code?
@parkjh673 Thanks for asking about the github repo. : ) It is now public: github.com/aabecker/dubins3D/ 🤖
Amazing classes
Which software????
This is in Mathematica. I like it because it is easy to do interaction manipulation
Dear sir..thanks for your great efforts, but the last transformation matrix =A1*A2 for the Cartesian robot d1 & d2 replace each other
I don't really get what's c1 and r1 in the A1 matrix. It has some connection to Theta1 but I don't really get it
The abbreviation for cos(theta1) is c1, and r1 is the radial distance of the rotation about the axis z0. This is the distance along x1 from z0 to z1.
Very cool Aaron and team!
So Intresting ! Good Job
you're making robot ribosomes... cool
cool
that is cool
Hi Aaron, I was wondering if you have the solutions to the homework assignments.
Thank you for making this video
But wouldn’t they walk around the whole world in 7-8 years?
Ammazing, I should have had it at the time of my classes in the University.
Really great simulation, thanks a lot for sharing the video and specially the code.
Should I have paid more attention in school to understand more than 20 words in this video?
So good demonstration
Great video! But when facing a real problem, the steering wheel have an angular speed, which means that it takes time to turn the wheel to a certain direction. Its particular hard to make a vehicle follow a trajectory when its L -> R or R -> L, because the wheel have to be really fast OR the car to be very slow or stop while turning the wheel
Hi dear sir, I am very much interested in your work. I tried to reach you through your email. If there is anyway we could connect then I would very appreciate that. Thanks.
I’d program them to travel directly into the win slot, then drop them in the arcade machine for profit ;-)
Hi, I have tried to contact you through your email. If there are any possible research opportunities then I am hoping to collaborate with you. Thanks.
Hi, Thanks for the great work. I am wondering which textbook you refer in the code such as "% pg 384 -> A matrix"?
Amazing visualization!
Great demo, high quality as usual, love your patience and tone when you speak prof❤
Nice video TQ
Can you please do a video/blog for won inverse kinematics for a free floating base like a quadruped, It's almost impossible to find anything on this topic on internet which is as detailed as the material you provided here. thank you!
this looks like Decimate Drive game, love it, how to implement this? and I wonder does it capable of avoiding obstacles or just works on plain fields
Hello profesor,which program were you used to create your robot model?
Mathematica.
@@AaronBecker ty
Hey Aron, thank you for the video. I would like to ask a question. if I want to implement this in real time or real world scenario how can I do? like if I have a car controlled by Arduino or raspberry pi, how can I implement this logic? I created a png image with all obstacles and available spaces. can you tell me how can I implement RRT?
Cars are well-suited for RRT. The new versions of Matlab have planners just for this. However, there are better ways. You can also check out my video on "Reeds shepp car" for a relatively straightforward implementation of this.
clear content
Great video, thank you prof!
Great video, thank you prof!
Hello, great video. Just a small note - there is an error at 22:15 in the Urep equation, the whole parenthesis should be squared. It would work also as written, but then the Frep would be different.
You are right. Thank you. I added an errata in the coments.
thank you for good explanation 🙌
Ooooo green tbese must be a different pay or worth more then silver I always wondered them silver balls to I see that all silver
It would be really fun to display the set of positions (orientation included) at a given distance r of an origin position (orientation included). The "metric circle" of radius r. Maybe segment of this metric circle could even be colored according to which one of the 12 generic types of path it's part of). A given metric circle seems feasible to display, several "concentric" metric circle of increasing r might be but I guess it would be a mess in the display as they can cross each other (with same position but different orientation).
Is there a small typo in the derivation for f_rep? I think U_rep misses a square
Possibly. Please give a time in the video and I'll check
Was looking for rrts, somehow found this, liked it
If there are other videos you'd like, let me know
Thank you so much!
Can you tell me the software you simulate the robot manipulator
Mathematica. You can make your own: demonstrations.wolfram.com/CommonRobotArmConfigurations/
@@AaronBecker thank you
Hello, I want to learn all the codes of Reed-shepps, but I can't find them on this website, can you teach me how to find all the codes? And can you tell me how to learn Reed-shepps curve?
you can literally just watch this video??
Hello thank you for you explaination. but i have a question. Why for LSR we use pythagore to get the straight line length ? maybe I have a theorie but i let you correct me. we do hypothenus = distance from center for Lstart to Rend side = sqrt(hypothenus *hypothenus /2) //cause each side should have the same length the side length = the straight line between each steering circle am i right ?
Love the vanishing points lecture. Thank you!
Love your content.
"The human body has no prismatic joints." I'd argue perhaps the vertical positioning of the larynx could be considered one.
This is the only video I've found so far which actually explains singularities. Rather than just saying "they're bad" or jumping straight into the mathematical formulae.
some of the slides say the reference book is RD&C. It should be RM&C, ie. Robot Modeling and Control
The first edition was named RM&C. The second and third editions are RD&C.
Sir Could you explain that how AutoTurn addon of AutoCAD works? and if possible could you implement it. It basicly takes initial vehicle position and end position with a given speed and it generates vehicle swept path. And it also work on truck with trailer
I think the addition of the trailer is the biggest difference, since increasing speed can be incorporated by increasing the minimum turn radius. autoturnonline.com/ shows the area swept out by the trailer. That is a good project, and I'll put it on my project list.
I answered too fast. The width of the swept path depends on the dimensions of the car and its orientation along the path. This is also an interesting challenge. See the figure here www.dimensions.com/element/passenger-vehicle-180-degree-turning-paths-radius that shows how different parts of the car body build the swept area. This will take some time!